La precisione nel timing è di fondamentale importanza per gli osservatori di occultazioni, ma anche gli astrometristi dovrebbero tenerne conto quando misurano la posizione di oggetti come i NEO (Near Earth Objects) in rapido movimento. Non è raro che oggetti molto veloci, che si muovono a velocità superiori a 100″/minuto (1,7″/sec), appaiano sul NEOCP (NEO Confirmation Panel) dell’MPC. Questi asteroidi sono interessanti per gli osservatori perché sono spesso molto luminosi (magnitudine intorno a 17 o meno), ma, d’altro canto, rappresentano un serio problema nelle misure posizionali perché gli errori temporali possono essere non trascurabili. Se consideriamo un asteroide che si muove a 120″/min (2″/sec), questo implica che un errore di sincronizzazione di soli 0,1 sec si traduce in un errore di posizione di 0,2″, circa il doppio della precisione desiderata quando si misurano asteroidi più lenti. Si noti che gli errori di timing sono solo una parte del problema e, se aggiunti a tutte le altre fonti di errore che influenzano le misurazioni astrometriche (guida scadente, residui elevati delle stelle del catalogo di riferimento, seeing cattivo, ecc.), non è raro che i residui aumentino a più di 1″, portando al rigetto delle osservazioni da parte del Minor Planet Center.
Step 1: sincronizzare il PC
Per risolvere il problema, prima di tutto è necessara una buona sincronizzazione tra il PC e una fonte di tempo affidabile. Ciò può essere fatto in vari modi:
- utilizzando un server NTP (SNTP è un protocollo più semplice e meno accurato) che invia l’ora corretta all’orologio del PC;
- utilizzando una camera GPS;
- utilizzando un dispositivo GPS che può interfacciarsi direttamente con il computer.
Il primo metodo è generalmente economico (o del tutto gratuito) e può essere una buona scelta se si utilizza un software affidabile. Personalmente ho utilizzato Meinberg (dopo alcuni anni con Dimension-4, che si basa ancora sul protocollo SNTP), che è possibile scaricare da qui; inoltre, è possibile controllare lo stato del server tramite l’apposito monitor sempre di Meinberg. L’utilizzo è molto semplice: basta disabilitare/disinstallare qualsiasi software simile (controllare in particolare le impostazioni di sincronizzazione di Windows per evitare conflitti), quindi Meinberg si occuperà di connettersi al server orario migliore, sincronizzando l’orologio del PC con una frequenza impostata dall’utente. In pratica, non è necessario fare nulla se non controllare periodicamente lo Status Monitor, che visualizza ritardo, jitter ed errore in millisecondi (offset). Si veda lo screenshot qui sotto.
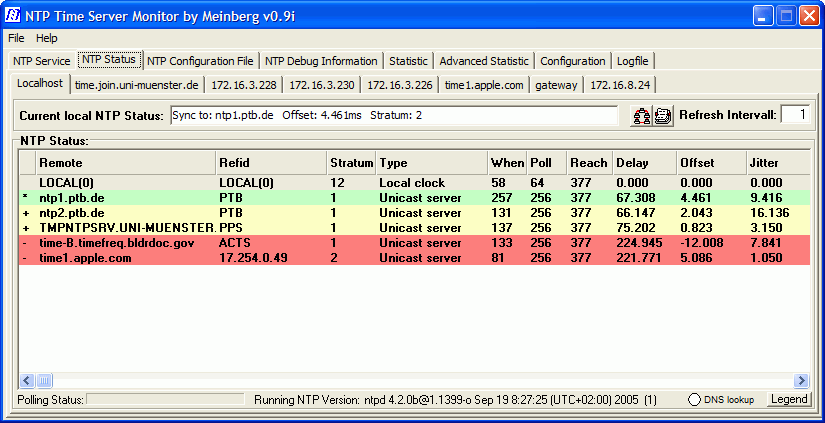
Screenshot dal Meinberg NTP Status Monitor
Insieme, due strumenti possono garantire una sincronizzazione accurata fino a circa 0,1 secondi, che è già molto buona, ma in pratica è necessaria una connessione internet (il che non è un problema in molti Osservatori, comunque). Ancora più importante, la connessione internet obbligatoria non è sempre stabile, e questo significa che la precisione varia nel tempo. L’errore di timing corrente può essere controllato su vari siti web (io uso https://time.is/), ma meglio non fidarsi ciecamente di quanto dicono.
Le camere GPS sono probabilmente la soluzione migliore in assoluto, ma non ne parleremo in questa sede perché sono molto costose e generalmente riservate agli appassionati di occultazioni.
L’ultimo metodo di cui parliamo qui consiste in un dispositivo GPS, che può ricevere l’ora assoluta dai satelliti GNSS (dotati di orologi atomici) e inviarla direttamente al clock del PC. Esistono varie soluzioni sul mercato; nel mio Osservatorio (codice MPC D43) utilizzo la TimeBoxII di Shelyak Instruments. Non è esattamente economica, diciamo quanto un buon oculare, ma costa molto meno di una camera GPS e può essere utilizzata anche per le occultazioni. L’uso è molto intuitivo: basta collegare la box al computer, portando l’antenna in dotazione all’esterno in modo che possa vedere i satelliti. Quando questi sono in numero sufficiente, l’indicatore nel pannello di controllo diventa verde e la TimeBox inizia a sincronizzare l’orologio con una precisione dell’ordine dei millisecondi. Il numero di satelliti in vista, insieme alla differenza tra l’ora assoluta e l’ora del PC, viene sempre visualizzato (vedi immagine sotto).

Il pannello di controllo della TImeBoxII
Step 2: calcolare il ritardo del proprio setup
Una buona sincronizzazione tra il PC e una sorgente affidabile di tempo è molto importante, ma non bisogna dimenticare che ciò che conta (e che si invia al Minor Planet Center) è il tempo dell’osservazione, scritta nel campo DATE-OBS dei file FITS della sessione astrometrica. Per semplificare, al termine di un’esposizione, il software che controlla la camera (ad esempio, SharpCapture) riceve i dati e calcola il relativo DATE-OBS, che in genere corrisponde all’inizio dell’esposizione. Sfortunatamente, però, il software non ha idea di quando i dati partono dalla camera e può registrare solo quando arrivano, quindi è importante calcolare questo ritardo per compensarlo adeguatamente.
È possibile utilizzare i PPS (impulsi al secondo) forniti dal LED della TimeBox insieme al timestamp delle immagini, oppure, più semplicemente, affidarsi ai satelliti GNSS (vedere il sito web di Bill Gray per approfondimenti sul metodo). In breve, è necessario misurare la posizione di un satellite di questo tipo, proprio come si misura un NEO veloce. Trovarne uno non è un problema, poiché in genere ne sono sempre presenti almeno una decina sopra il nostro orizzonte e il sito web di Bill Gray ne fornisce delle effemeridi accurate. Sono in genere molto luminosi (intorno alla magnitudine 1o-11) e molto veloci, quindi è necessario un tempo di esposizione molto breve se non si vogliono delle strisciate. In genere, io non uso più di 0,1 o 0,2 secondi in modo che il software astrometrico possa generare una PSF simile a quello di una stella e calcolarne facilmente il centroide. Se si vuole utilizzare esposizioni più lunghe, si otterrà una strisciata anziché un segnale puntiforme; in questo caso, è possibile utilizzare il righello (ruler) di Tycho Tracker, contrassegnando gli estremi della traccia e quindi facendo calcolare al software il punto medio (vedi sotto). Nonostante si possa pensare che sia una buona idea utilizzare le notti di luna piena per questo tipo di lavoro sui satelliti, occorre prestare attenzione a non avere troppe poche stelle nel campo, il che potrebbe degradare la soluzione astrometrica. Gli specialisti di occultazioni preferiscono in genere SharpCapture come software di acquisizione. E’ quello che uso anche io per l’astrometria, mentre preferisco FireCapture per lavori planetari e in generale a larga scala d’immagine.
Fare molta attenzione alle impostazioni utilizzate per le immagini (ROI, binning, profondità di bit, ecc.), che devono essere esattamente le stesse utilizzate per le ordinarie riprese astrometriche in modo da avere lo stesso delay temporale rispetto alle sessioni con i GNSS, mentre il gain e tempo di esposizione dovrebbero avere un impatto limitato (o nullo). Quando il satellite entra nel campo visivo, lo si noterà subito direttamente a schermo, quindi si acquisiscono almeno 10 o 15 immagini, di cui le migliori saranno poi misurate. Meglio utilizzare le immagini dove il satellite non è troppo vicino al bordo dell’immagine, o appare deformato.
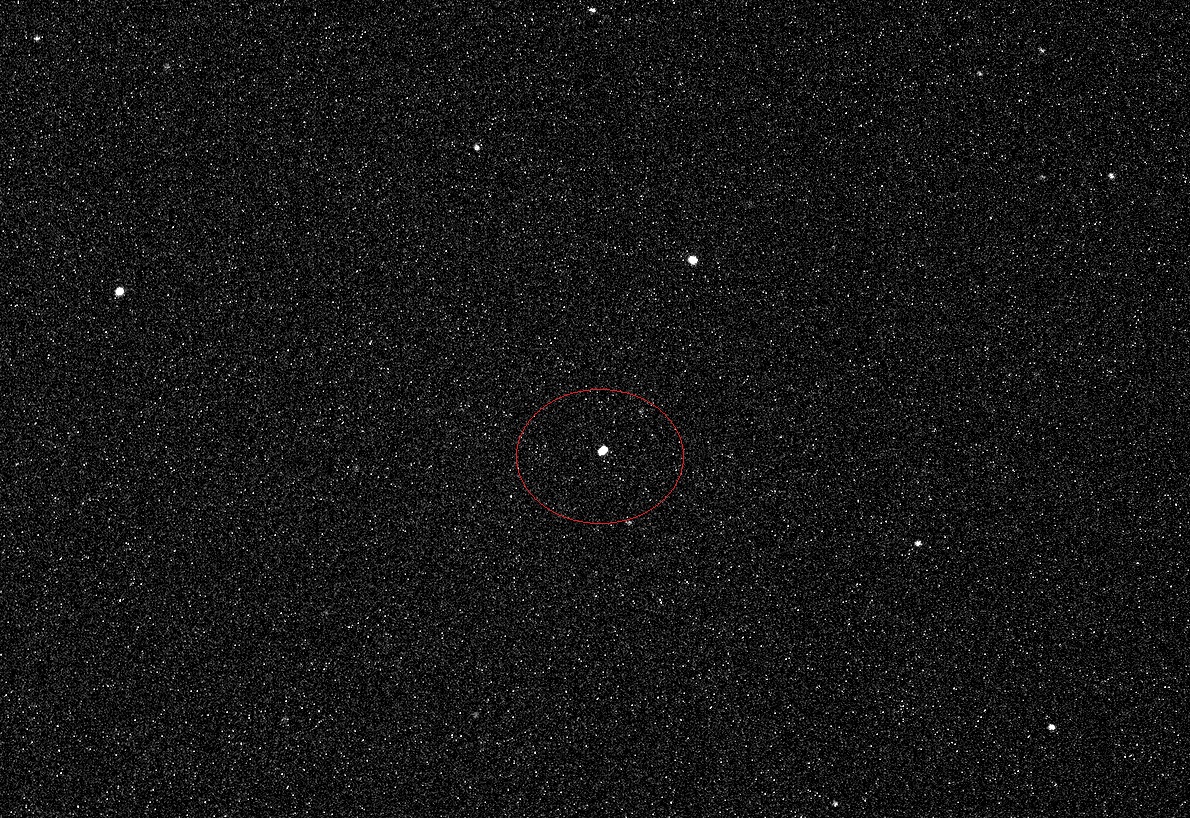
Il satellite E-15, ripreso con 0,1 secondi di esposizione, non mostra alcun movimento apprezzabile
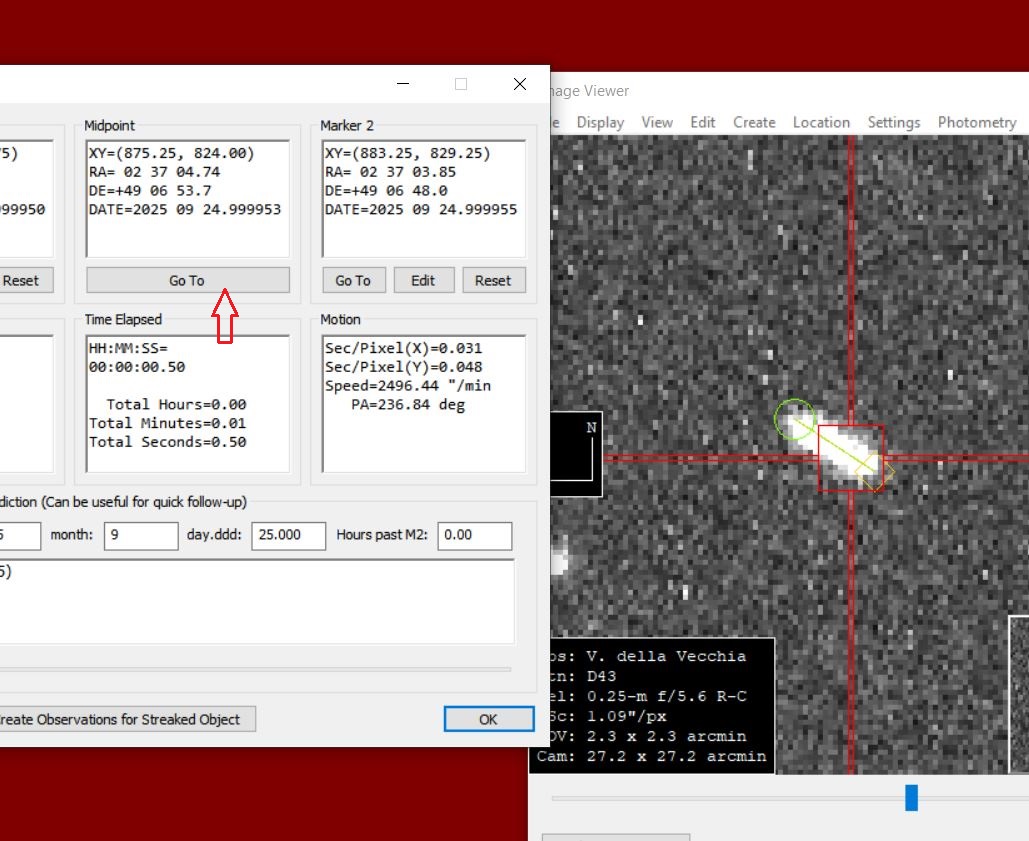
Creare un righello e selezionare il punto medio in Tycho Tracker è molto utile quando si utilizzano tempi di esposizione più lunghi (in questo caso, 0.5 sec)
Ora è il momento di calcolare l’astrometria per il satellite, il che si fa nel solito modo. È meglio creare un report ADES piuttosto che uno classico a 80 colonne, poiché il primo consente una maggiore precisione temporale, copiando poi le osservazioni nella pagina appropriata del sito web di Project Pluto.
Si ottiene un output come questo:
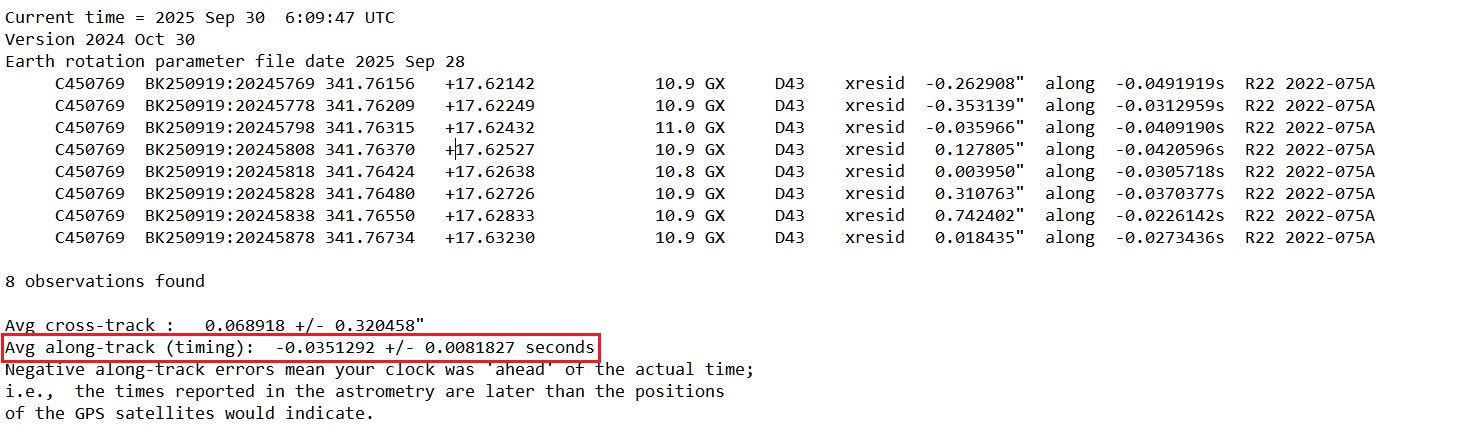
dove le prime colonne sono le nostre osservazioni, che terminano con il codice dell’Osservatorio. In basso, viene calcolato l’errore temporale medio (nel riquadro rosso), nel mio caso pari a -0,03 secondi, mentre l’altra riga (avg cross-track) dà l’errore medio di posizione. Meglio non basarsi su un singolo set di immagini, ma fare almeno 2 o 3 sessioni usando diversi satelliti, calcolando poi la media degli offset temporali. Dispersioni troppo grandi tra le varie misure sono sospette, e, se capita, è meglio ripetere la sessione.
L’errore temporale delle osservazioni singole e quello medio dovrebbero essere abbastanza costanti se si mantengono invariati tutti i parametri di ripresa, come nell’esempio sopra.
Step 3: correggere il tempo dell’osservazione
A questo punto, l’ultima cosa da fare è correggere il tempo delle osservazioni con l’errore temporale trovato. Ciò può essere fatto con software di acquisizione come MaximDL (a pagamento) o direttamente con software astrometrici come Tycho Tracker, dove è davvero semplice.
Nel menu “Observatory”, si seleziona il proprio Osservatorio e si inserisce l’offset trovato in Project Pluto, conservando il segno:
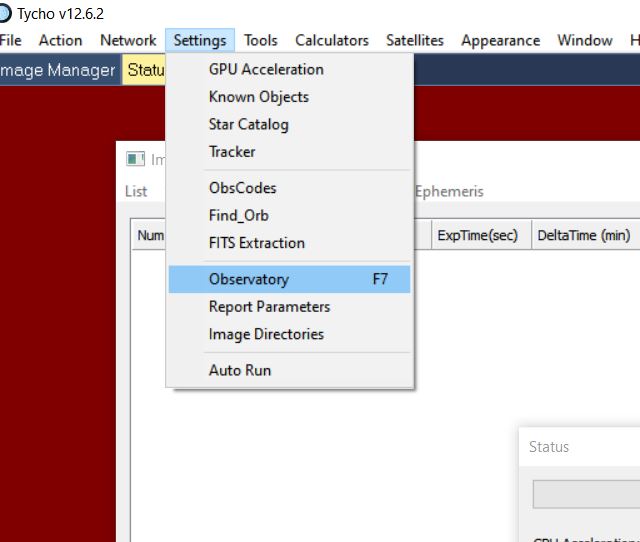
Observatory settings in Tycho Tracker
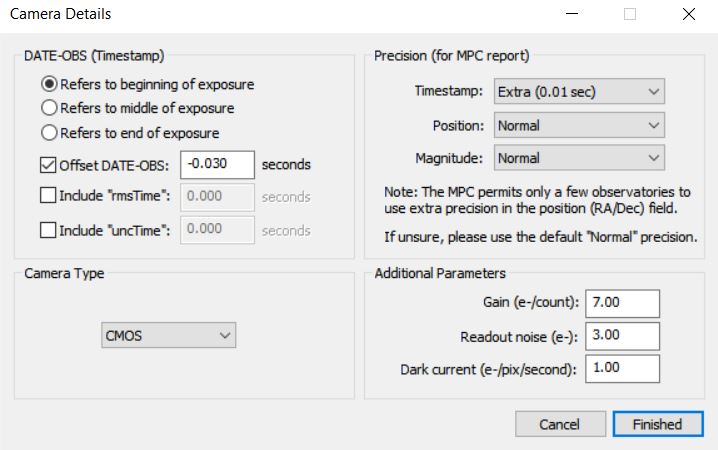
Inserire l’offset trovato come indicato qui
Da adesso in poi, il software aggiungerà/sottrarrà l’ammontare di tempo indicato al campo DATE-OBS dei FITS per calcolare l’ora di osservazione effettiva.
Di recente ho avuto la possibilità di testare la mia configurazione TimeBoxII+GNSS sul velocissimo NEO 2025 UC8, presente sul NEOCP come ZTF1086, che all’epoca (fine ottobre 2025) si muoveva a ben 160″/minuto. Al momento della stesura di questo articolo, l’orbita ha un’incertezza di 1″, quindi i residui potrebbero variare in qualche modo in futuro, tuttavia quelli del mio Osservatorio sono piuttosto soddisfacenti, come si vede nello screenshot qui sotto, creato con FindOrb.
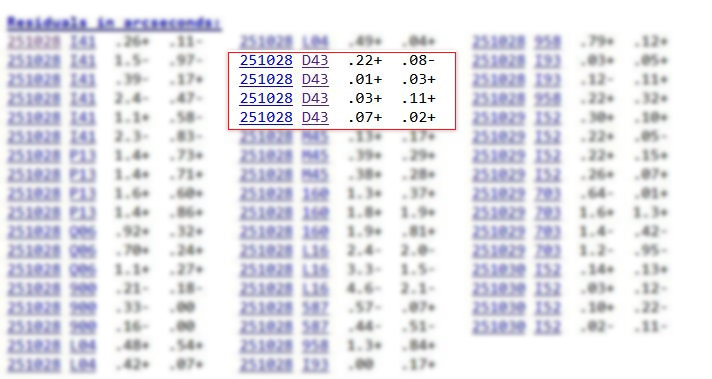
Residui del velocissimo NEO 2025 UC8 misurato nel mio Osservatorio (D43)